Attitude Determination System
Use the Attitude Determination System page to select the type of attitude determination for the simulated spacecraft. There are three types to choose from:
- Perfect
- Fixed Gain Filter
- Extended Kalman Filter
Perfect AD assumes that the spacecraft has perfect knowledge of the spacecraft attitude and angular rate which can be useful for applications where attitude sensor performance is not of interest. The Fixed Gain and Kalman filters uses sensor measurements from the Sensors page to estimate the current attitude and rate bias of the system.
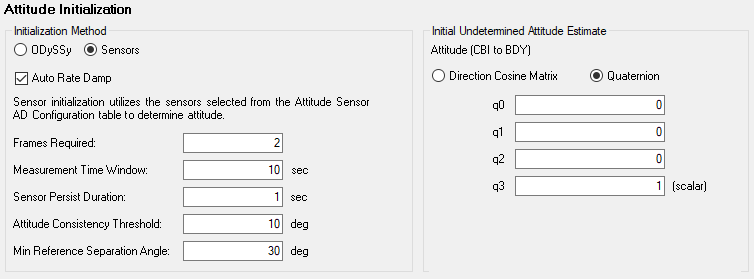
Attitude Initialization
When the spacecraft reboots or initializes for the first time, a valid estimate of its current attitude quaternion does not exist. To initialize the attitude, sensors are used to form an initial coarse estimate. A single star tracker is sufficient to form the initial quaternion estimate. A minimum of two concurrent measurements are required for vector sensors (Sun, Mag, Horizon). These measurements must also not be colinear.
SOLIS can operate with the attitude state determined or undetermined. In the determined state, the attitude sensor measurements are incorporated with the rate sensors to form a best estimate of the true attitude quaternion. In the undetermined state, only the rate sensors are used to propagate an arbitrary quaternion.
Initialization Glossary
| Parameter | Description | Units |
|---|---|---|
| Initialization Method | This radio button determines whether the sensors will be used to form the initial attitude or if ODySSy will be used. The use of ODySSy simulates a perfect immediate acquisition of the true attitude. | N/A |
| Auto Rate Damp | The default spacecraft behavior upon acquiring or losing attitude determination state is to command Rate Damp. You can override this behavior by clearing the checkbox and pointing to a custom defined sequence. | bool |
| Determined/Undetermined Sequence | The dropdown menu enables you to select a sequence to kick off as the spacecraft goes into a Determined or Undetermined attitude state. | N/A |
| Frames Required | Determines the number of frames required for valid measurements to exist before acquisition will be allowed. | count |
| Measurement Time Window | Determines the time window for which the number of valid measurements will be considered. | s |
| Sensor Persist Duration | Duration to persist sensor measurements for initialization. Keeps sensor measurements valid if they come in asynchronously. | s |
| Attitude Consistency Threshold | Determines the consistency required from one measurement to another for the measurement to be considered valid. | deg |
| Min Reference Separation Angle | Determines the angle required between two vector sensor measurements for them to be considered valid (not colinear). | deg |
| Initial Undetermined Attitude Estimate | Specifies the arbitrary initial quaternion to propagate from while in an undetermined state. | N/A |
Selecting the Attitude Determination System model
You can select one of the following attitude determination system models for a SOLIS run:

Perfect Attitude Determination
Perfect Attitude Determination provides the spacecraft with perfect attitude knowledge by utilizing the simulated attitude. Sensor inputs are ignored, so there is no need to configure sensors when using Perfect Attitude Determination.
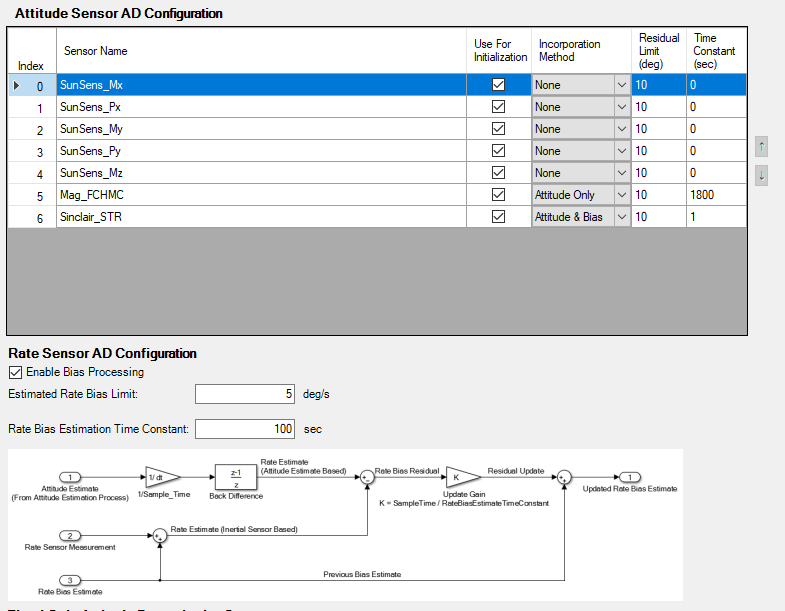
Fixed Gain Filter
The Fixed Gain Filter estimates attitude by sequentially processing each sensor measurement and proportionally weighting the update to the attitude estimate based on a specified time constant. The attitude estimate is first propagated with the rate sensor measurement, and the result is augmented based on measurement residuals from each sensor. The Fixed Gain Filter also estimates the rate sensor bias by back-differencing the attitude estimate and incorporating the residual. This filter is similar to a typical Kalman Filter in that the measurements are processed one at a time, but the update gains do not vary based on state or measurement covariance.
Fixed Gain Filter Glossary
| Parameter | Description | Units |
|---|---|---|
| Use For Initialization | Determines whether the sensor is used for an initial attitude estimate when the attitude state is undetermined. | bool |
| Incorporation Method | Determines how the sensor is used in the update process. Selecting Attitude Only will prevent the sensor from being used to satisfy the 3D attitude fix criteria. Selecting None will completely ignore the sensor for attitude and rate bias estimation. | N/A |
| Residual Limit | Used to reject residual measurements that exceed the limit. | deg |
| Time Constant | Used to configure the sensor update gain such that the measurement is incorporated over a specified duration. Step response behaves like a first-order, low-pass filter where Time Constant represents the duration to reach 1 - 1/exp(1) of the step magnitude. The filter update gain is computed as dt/Time Constant. Time Constants < dt are set to dt such that the full update is incorporated in one frame. |
s |
| Enable Bias Processing | Clearing this check box will use the "Attitude Only" incorporation method even if the sensor is set to "Attitude & Bias". | N/A |
| Estimated Rate Bias Limit | This is the maximum estimated magnitude of the rate bias. | deg/s |
| Rate Bias Estimation Time Constant | This is the same as Time Constant above, but for rate bias estimation. Small time constants will converge quicker but provide less filtering. They will also diverge quicker if poor measurements are used to estimate rate bias. | s |
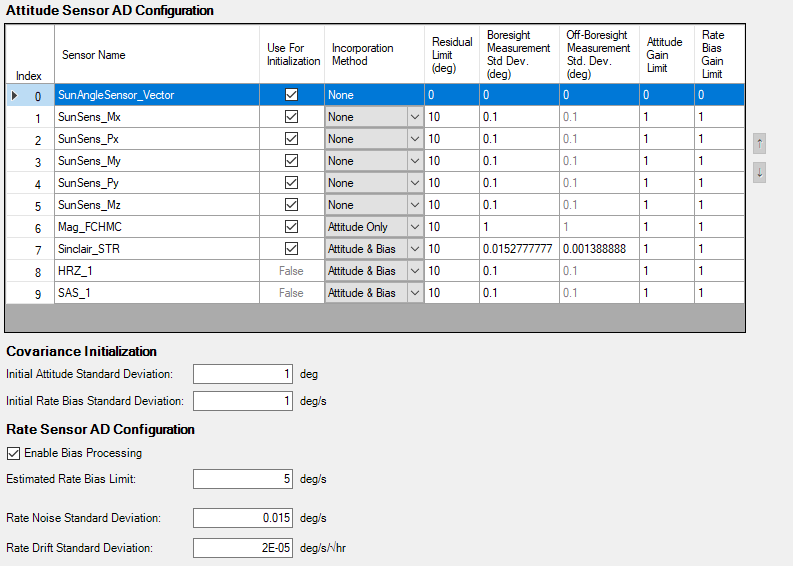
Kalman Filter
The Kalman Filter estimates attitude by sequentially processing each sensor measurement and weighting the update based on Bayesian statistics. The attitude estimate is first propagated with the rate sensor measurement, and the result is augmented based on measurement residuals from each sensor. The Kalman Filter also estimates the rate sensor bias by back-differencing the attitude estimate incorporating the residual based on the computed Kalman Gain.
Kalman Filter glossary
| Parameter | Description | Units |
|---|---|---|
| Measurement Standard Deviation | This term relates to the measurement noise of an individual sensor. These values are often specified as a covariance, which is the square of the standard deviation. | deg |
| Attitude Gain Limit | The Kalman filter has six states, three of which are attitude error states. This parameter determines the maximum computed Kalman gain allowed for those states. | N/A |
| Rate Bias Gain Limit | The Kalman filter has six states, three of which are rate bias error states. This parameter determines the maximum computed Kalman gain allowed for those states. | N/A |
| Initial Attitude Standard Deviation | Represents initial uncertainty in the attitude estimate upon filter initialization. | deg |
| Initial Rate Bias Standard Deviation | Represents initial uncertainty in the rate bias estimate upon filter initialization. | deg/s |
| Rate Noise Standard Deviation | Represents the process noise from the rate sensors associated with the attitude error. | deg/s |
| Rate Drift Standard Deviation | Represents the process noise from the rate sensors associated with the rate bias error. | deg/s/√hr |